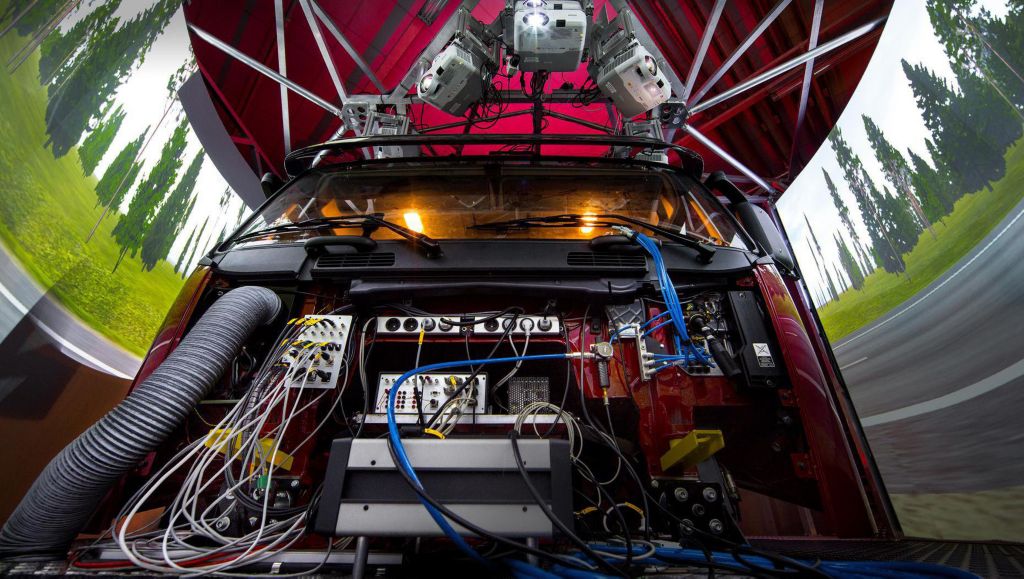
Bir dizi bilgisayarın test sürücülerinin sürüş, izleme ve yolda kendilerini konumlandırma yöntemlerini kaydettiği operatör odasında oturuyor. Çok büyük miktarlarda bilgi toplanıyor. Nispeten yeni bir test teknolojisi türü olan bu sürüş simülatörünün temel avantajlarından biri, sürücüyü yeni ürünleri geliştirme sürecine daha erken bir aşamada dahil etmeye olanak tanımasıdır.
Kristoffer Tagesson, "Geleneksel yöntemde, pratikte işlevsel olup olmadıklarını görmeye yönelik testleri yapabilmek için ilk önce her şeyi (yollar, araçlar ve güvenlik sistemleri) üretmek gerekiyordu. Artık bunu paralel şekilde gerçekleştirmek mümkün" diye açıklıyor.
Başka bir ifadeyle sürüş simülatörü, yeni araçları gelecekteki sürüş ortamlarında test etmeyi ve bunu şimdi yapmayı olanaklı kılıyor. Volvo Kamyon'daki bir diğer endüstri bölümü doktora öğrencisi olan Peter Nilsson tam da bu tür bir proje üzerinde çalışmaktadır.
Peter Nilsson, "Araçta yapılan çalışma ve altyapı geliştirmesi, uzun vadeli bir perspektife dayanıyor. Temel olarak tüm yol ortamlarını canlandırabilen bu simülatör sayesinde, bu geliştirmeleri birlikte optimize edebiliyoruz" diyor.
Peter Nilsson'un projesinin adı Safe Corridors (Güvenli Koridorlar) ve bu projede, 27 ile 34 metre arasındaki uzun araç kombinasyonları için güvenli koridorlar bulmanın yolları araştırılıyor.
Peter Nilsson, "2020-2030 itibariyle, çevre açısından etkili bir alternatif oldukları için bu uzun araç kombinasyonlarının yollarda olacağına inanıyorum. Ancak o zamana kadar sürücü için sürüşü kolaylaştırmanın bir yolunu bulmamız gerekiyor, çünkü treylerin tam konumunu bilmek gerçekten büyük bir zorluk" diye açıklıyor.